

An often-cited challenge when developing self-driving cars is the need to drive Millions or potentially even Billions of kilometres to test for all possible scenarios and conditions. Awareness is growing that early use of simulation is a crucial step in fast-tracking the development of all autonomous systems, allowing engineers to test and validate the performance of different components and systems in an infinitely scalable, virtual environment (limited only by hardware constraints) which can help identify and solve issues with a system before they become a problem in real life.
When tasked with developing autonomous vehicles, drones, robots and similar equipment, engineers and designers clearly face key safety and reliability challenges, many of which relate to the accuracy and integration of machine vision / sensor perception technology. These technologies must be designed to deliver flawless operation in all environments, including harsh conditions such as low light, fog, heavy rain – all while operating within highly complex and/or dynamic environments.
In the video below, while speaking at APAC21, Thomas Benke from LEAP Australia describes a number of examples to demonstrate how engineering simulation tools can form part of a complete control loop of an autonomous system (whether that is a vehicle, drone, robot, UAV or similar), and allow a multidisciplinary team of engineers to replicate the real world performance of sensors and autonomous system by utilising a consistent and repeatable virtual test environment:
Thomas begins by noting that, generally speaking, electronic pre-compliance is a big topic in Australia. Simulation is an important tool that helps engineers to reduce the cost of their EMC and environmental tests. Another trend is the use of Digital Twins that represent physical devices, fed with real world data from sensors and measurements on the real device. With the help of those inputs, the simulation model feeds a digital twin which is able to predict and forecast operational parameters and allow for more informed decisions to improve operational decision making.
In order to test ADAS algorithms for machines in dynamic scenarios, closed-loop simulations represent the most complete approach. With a physical representation of sensors and the software connected to dynamic scenarios, it is possible to not only test the decision-making algorithms, but also provide an environment for the system to continue to learn and improve.
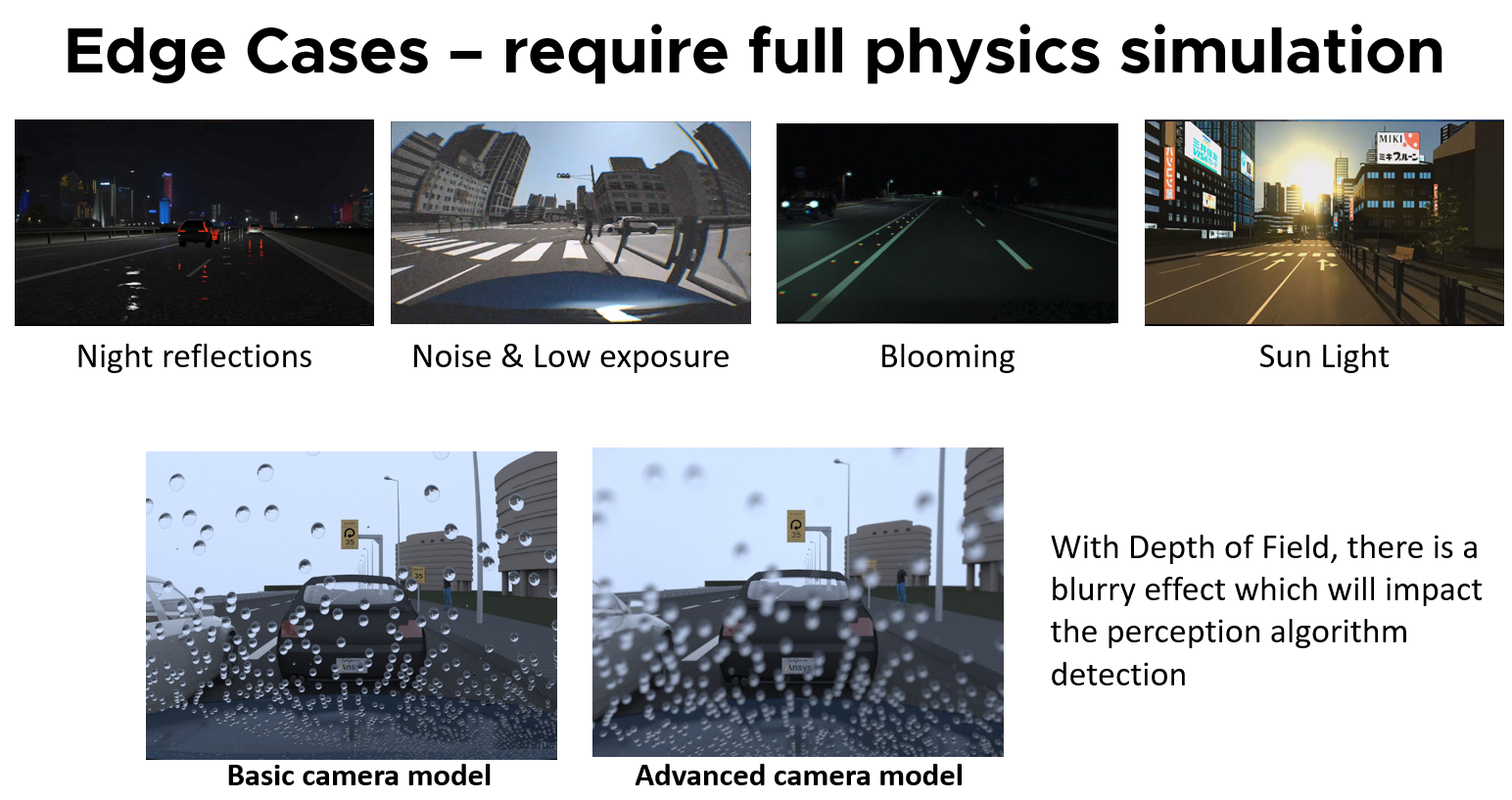
Why is it useful to integrate a simulation model of your sensors? There are a number of edge cases and difficult situations that can arise when using a camera, such as reflections, looming, and the effects of sunlight and droplets on the windscreen. To address these issues, camera simulation can be used to produce real-world pictures based on real camera performance specifications, such as depth of field and resolution. This can be achieved by using a ray tracing engine to load in a picture of a parking lot and merge it with a simulated dashboard and car model.
The ability to simulate other sensor types such as lidar and radar is also critical. Lidar simulation allows engineers to test the performance of different lidar systems and firing sequences, without needing access to the physical components. Similarly, radar simulation can help to identify and address issues such as ghosting and reflections that can negatively impact the vehicle’s ability to detect objects, as Thomas demonstrates in the second half of the video above.
What’s next?
The development of autonomous vehicles requires a thorough understanding of the various components that make up the system, and a focus on both functional safety and performance testing. Camera and sensor simulation plays a key role in ensuring that the system can handle a wide range of edge cases and difficult situations. Ansys has developed a powerful and integrated package for autonomous vehicle simulations which allow engineers and developers to test and validate the performance of different components and systems in a virtual environment.
At LEAP, we are excited to help local developers of autonomous systems to use this simulation toolkit to ensure the safety of their products by identifying and solving issues before they become a problem on the road, the mine site, in the air, or in your manufacturing plant. You can contact us to set up a discussion with one of our autonomous experts at this page.