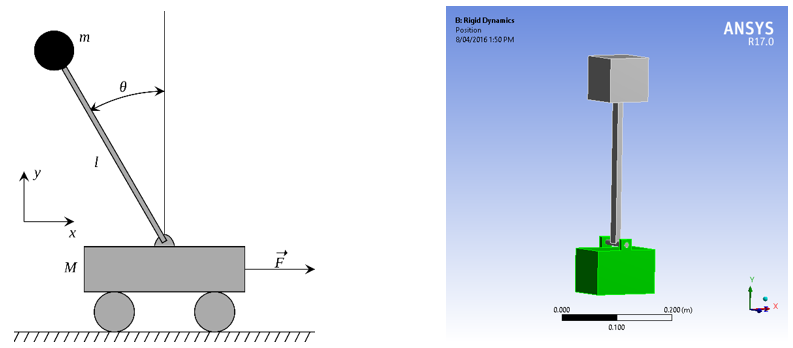
The inverted pendulum on a cart is a classic control theory problem for demonstrating control of an inherently unstable system. Left to its own devices, an inverted pendulum will always fall away from the centre. The cart is controllable however and can move either left or right in order to stabilise the motion of the pendulum and keep it balanced in the centre. There are many examples of this type of system in engineering from balancing rockets using gimbals to balancing a human being on a Segway. The simplified pendulum model consists of a cart with mass M and propelled by a force F in addition to a mass m at the end of a rod. The carts motion is restricted to only moving in…
Archives
Analysing Large Fabricated Structures
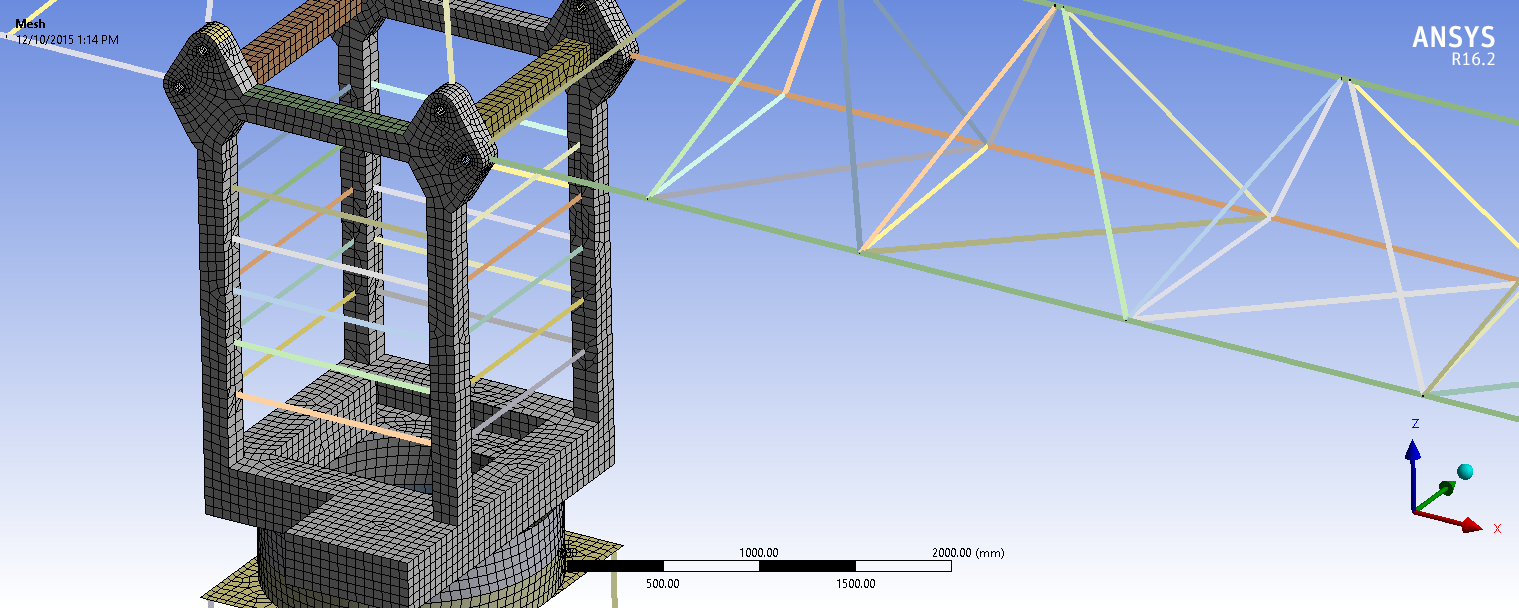
Cranes and lifting equipment pose a unique problem when considered in a finite element analysis. Their sheer size often prevents users from analysing these structures using regular solid elements. Instead, beam elements must be used to reduce the model to a manageable size. The problem with this approach, however, lies in the process of extracting beam elements from the original solid CAD geometry. Meshing and model solution are other issues which may arise if the wrong tools are chosen for the job. The video below outlines the considerations that should be made when preparing for the analysis of large fabricated structures. Luckily, ANSYS provides advanced solutions to address common issues encountered throughout a typical FE workflow for cranes and lifting equipment. Geometry Clean-up and…
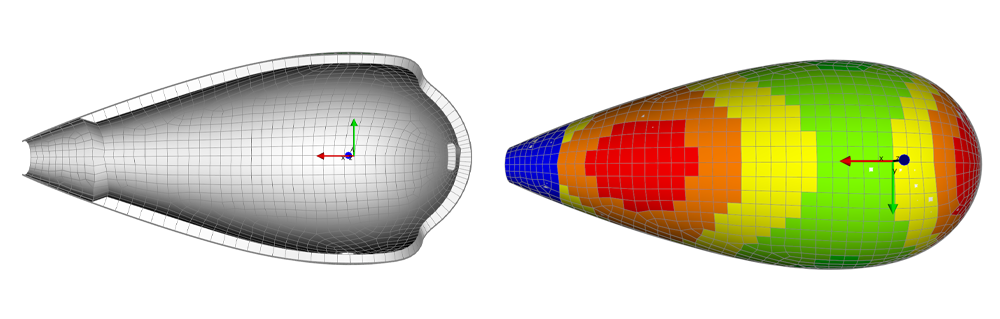
End to End System Design with ANSYS – An Electric Guitar Example
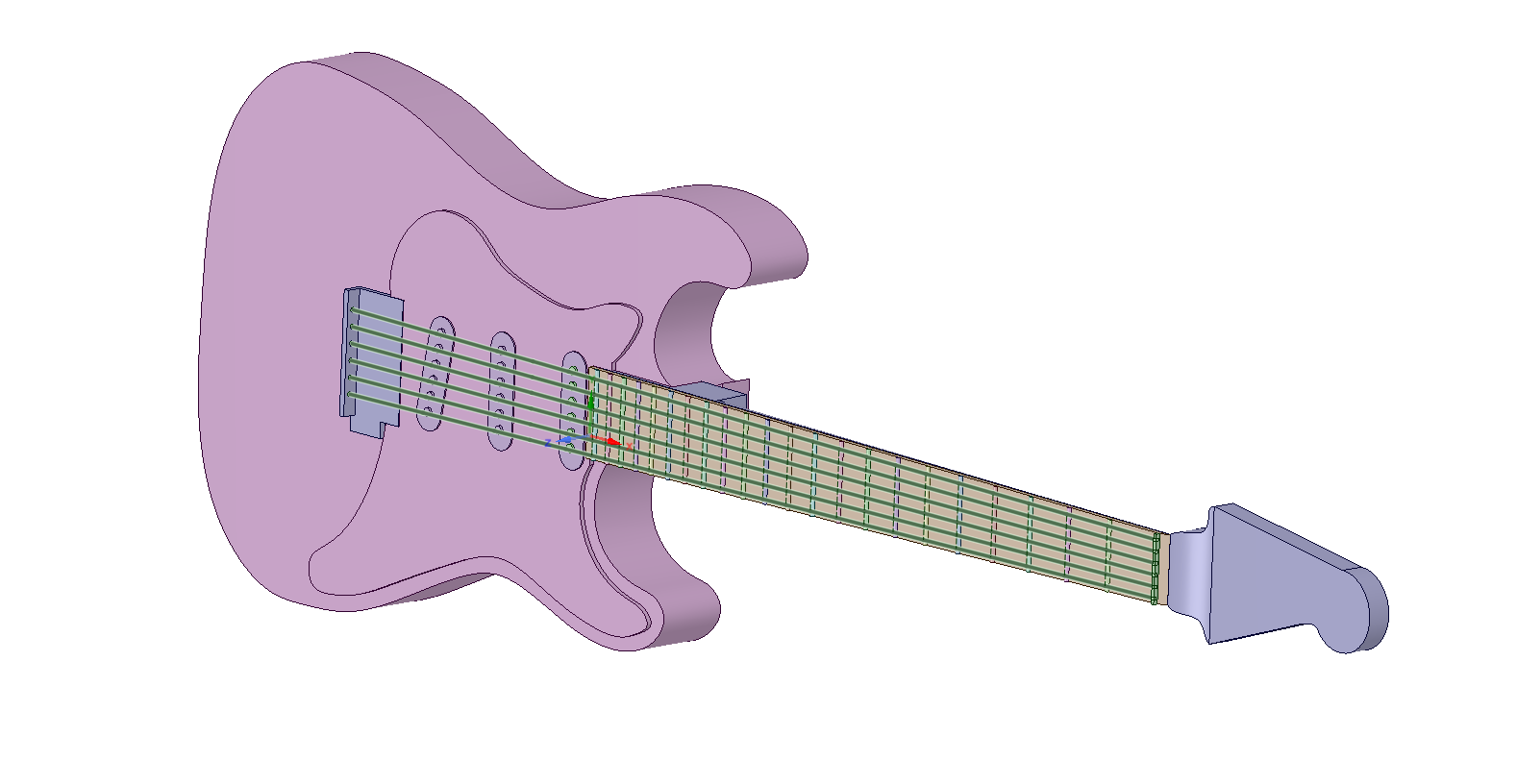
The world of music is dominated by nonlinear devices. From the wood construction of a guitar neck to the neodymium drivers in PA speakers, every device in the chain has a nonlinear response and these are often exploited to produce a unique sound. To predict with certainty how changes to individual components are going to change the performance of the overall system and therefore the tone generated, we need to consider an entire system. The Fender Stratocaster is a renowned instrument in the industry densely populated in options. The body, neck, and fretboard are all constructed from different varieties of wood which changes the response and tonality of the guitar body. The construction and materials used in the magnetic pickups also has a major impact…
Reduced Order Modelling for System Simulation with ANSYS Simplorer
In a previous blog post, we explored the overall capabilities of ANSYS Simplorer. In this post we will be focusing on Reduced Order Modelling (ROM), specifically the techniques available within Simplorer. ANSYS has a range of solvers designed to simulate high fidelity models in each of the three main physics areas. When simulating at a System level, most of this detail is not required and could be left out of the overall simulation. For example, a sufficiently detailed model of an electric motor would only need the input voltage/current and the current speed of the motor as inputs and the torque as outputs. It could also be beneficial to add extra inputs such as temperature but knowing the current distribution in the windings or the…
Analysing Composite Structures with ANSYS PrepPost
The design and construction of composite structures represents a powerful and lucrative industry that is predicted to grow dramatically as demand increases for the high strength, low weight properties possible with composite materials. Part of the ANSYS Workbench environment, ANSYS Composite PrepPost provides tailored tools for the multitude of composite specific problems that face designers and engineers. This post will provide an overview of features within ANSYS Composite PrepPost, highlighting the benefits it provides to users. Ply Tapering When using shell elements, the creation of variable thickness parts poses great difficulty for traditional layer section definitions. With the use of edge sets in ACP (Pre), varying thicknesses can be easily captured with an intuitive taper angle controlling the drop off of plies from the part…
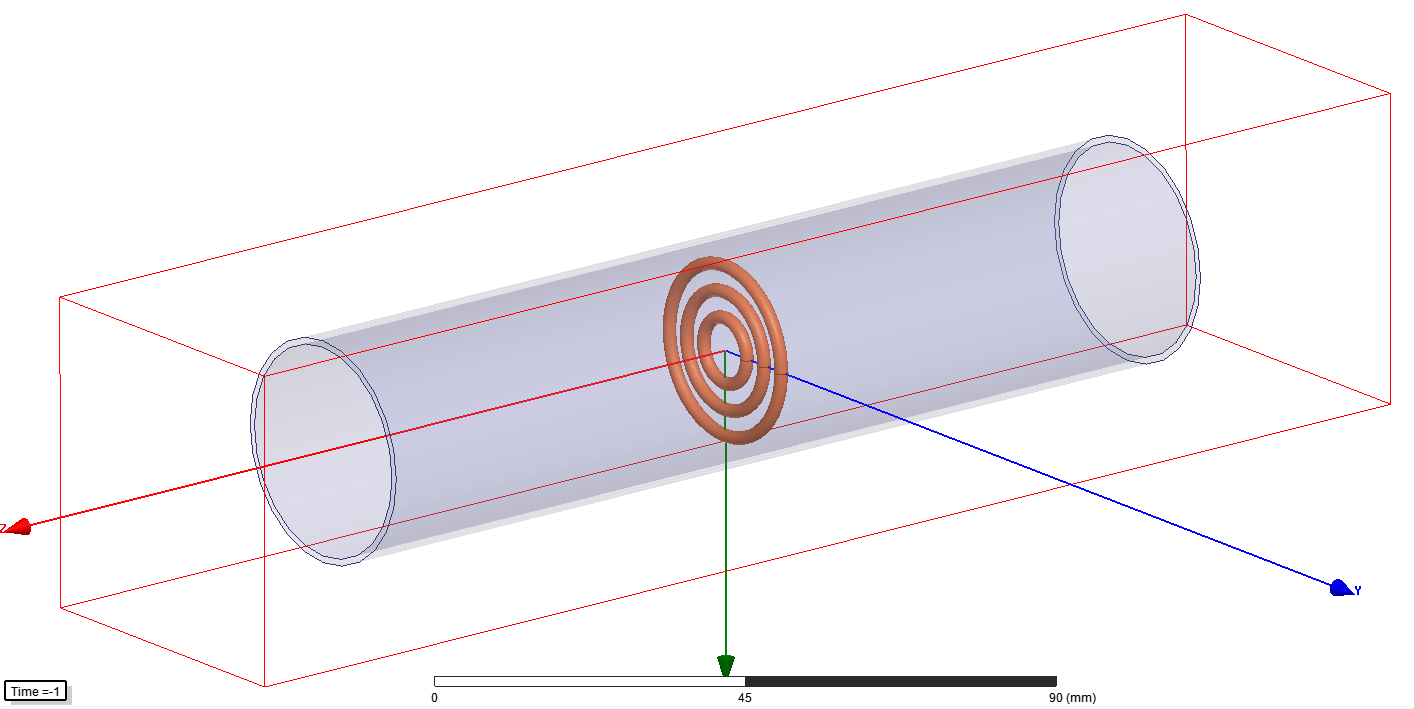
ANSYS Simplorer – High Fidelity System Simulation
A wide range of industries are taking their single physics simulation tools and moving towards a multiphysics approach which couples two or more solvers to close the gap between simulation and reality. Rotational electromagnetic machines in particular use all three of the main physics areas to design products which achieve increasingly high performance and reliability targets using less material and consequently less cost. However these components are always part of a complex larger system which is time dependent. Simulating a single turn of a motor with all three major physics areas is a time consuming task, simulating a control system driving the motor over millions of rotations is simply infeasible. How can we take such detailed simulations and simulate the entire system without sacrificing the…
Breakthrough in accurate load mapping for bulk materials applications: DEM – FEA Coupling with ROCKY 3.0 and ANSYS (Part 1)
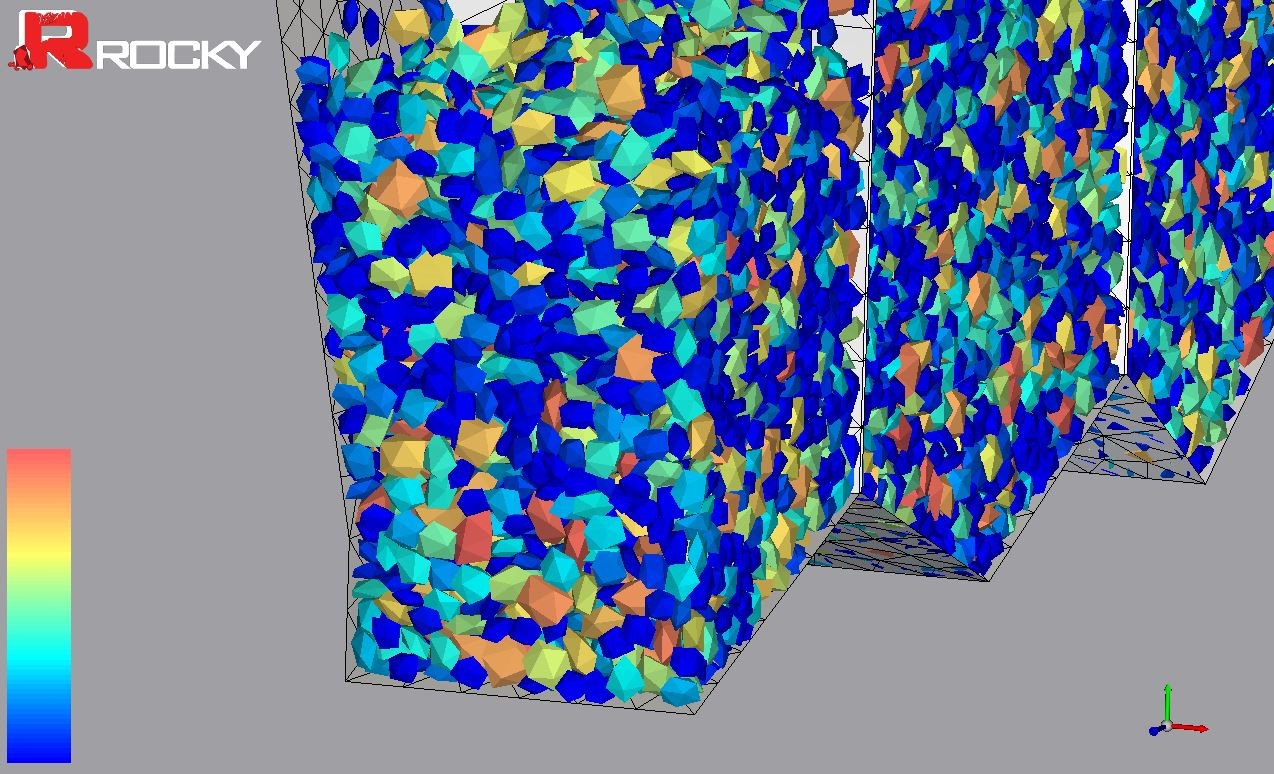
Today we present a new and easy way to transfer loads from DEM simulations (ROCKY version 3.0 released September 2014) to ANSYS using External Data coupling in ANSYS Workbench. Discrete Element Method and ROCKY The Discrete Element Method (DEM) is a computational technique originally developed in the 1970s that has gained great popularity in recent years as advancements in computer hardware technology have allowed much faster and more accurate representations of complex particle systems, as commonly found in bulk materials handling problems. The DEM approach is mainly used for the simulation of granular materials, which consist of a large number of solid particles. DEM can for instance be used to predict and optimize granular flow, belt & liner wear and life, tracking, blockages, spillage, punctures,…
Designing Quieter Products With Computer Aided Engineering
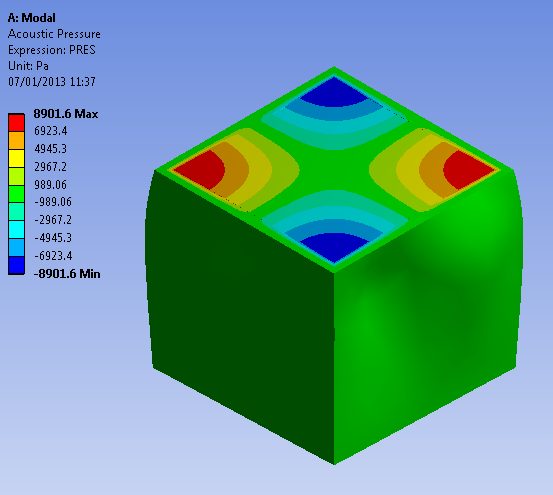
In today’s marketplace companies are using simulation technology more and more in their product development process to make product development faster and to produce better quality products. Often the assessment of the acoustic qualities of a product is conducted towards the end of the design cycle in a build and test scenario which is both costly and time consuming. If you want to produce quieter products, faster, then simulating acoustics with computer aided engineering (CAE) tools can help you get there. Understanding the acoustic properties of the design is key to producing the best possible outcome and with today’s CAE tools this is not just possible but is easier and faster than ever before. Typical Applications of acoustics include: Sonar Design of concert halls for…
Topological Optimisation with FEA
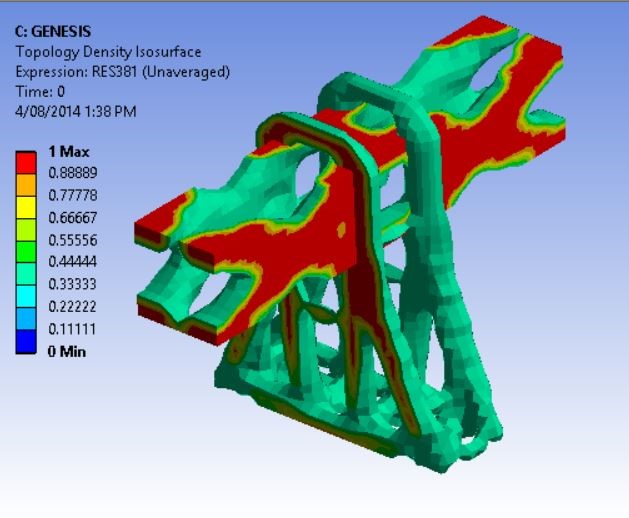
Often companies are under huge pressure to minimise the cost and weight of their products and optimise their design. Finite element technology allows engineers to improve their design in a virtual simulation world but often this is done manually using a trial and error approach. By using the optimisation kernel inside ANSYS (powered by GENESIS, developed by VR&D) this design process can be carried out much more quickly and easily. Optimisation methods in finite elements are either based on optimising grid locations (shape optimisation), geometric properties (sizing optimisation) or material properties (material optimisation). A special case of shape optimisation, where grid points can only move in normal (or a given) direction to the shell is called topography optimisation. A special case of material optimisation…
Meshing Improvements with ANSYS 15
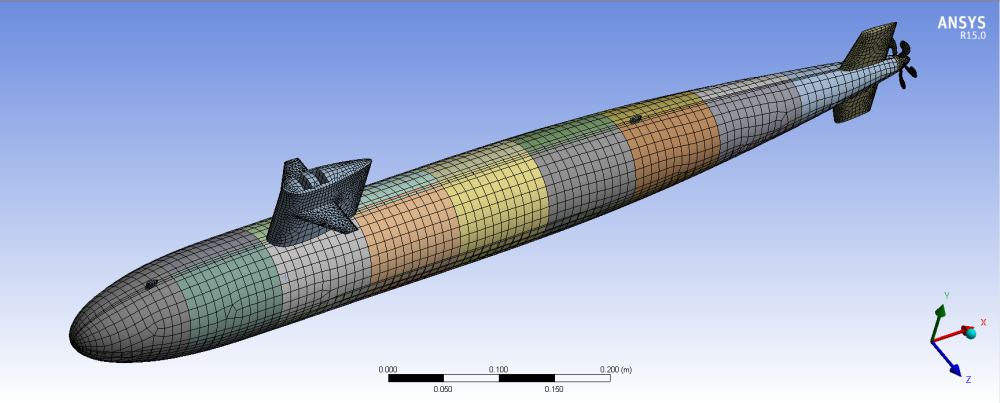
ANSYS Meshing has developed rapidly within the last five years; Body by Body meshing was introduced in 2011 with the emergence of R13, followed a year later by Mesh Connections in R14. A little known feature within R14 is the capability to record and replay meshing strategies in order to increase meshing robustness (See image below). A new feature within ANSYS R15 is the introduction of parallel part meshing, where ANSYS Meshing will use one core per part within an assembly. The increased speed of mesh generation in R15 compared to R14.5 is very noticeable, with meshing times reduced by at least half for almost every model tested. The great part about this new feature is that it…